RRT Algorithm:
Rapidly-Exploring Random Tree
Author: Chahat Deep Singh
March 27 2017
University of Maryland College Park
Instructions:
- Run the file RunMe.m in Matlab (R2007b+)
-
Make sure the files: (a). create_map (Not required for the RunMe file) (b). draw (c). edge_fn (d). find_new_node (e). goal_edge (f). map.mat (g). nearest (h). RRT (i). problem are in the same folder.
- If there is no map.mat, run create_map file to generate the map with obstacles. (it will generate map.mat)
- To update the map, run create_map.m and then Run RunMe.m for RRT.
- Input argunments are to be changed in ‘problem.m’ file
Input Arguments:
- Start Node: start_node [x y]
- End Goal: goal [x y]
- r_goal: Radius of the End Goal region
- Epsilon: Minimum Step size for the RRT
- Change the input data
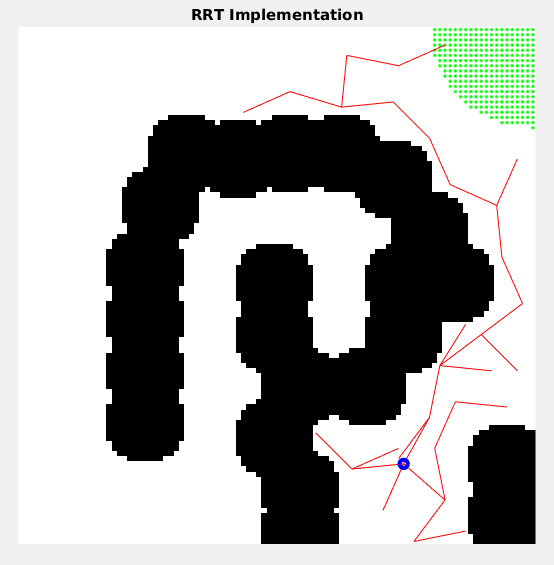
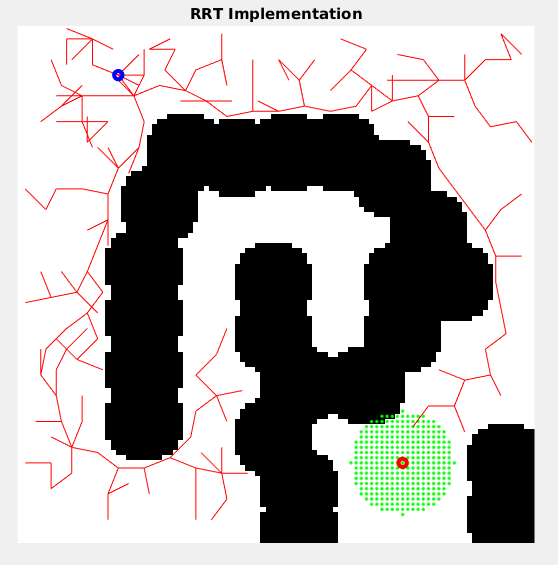
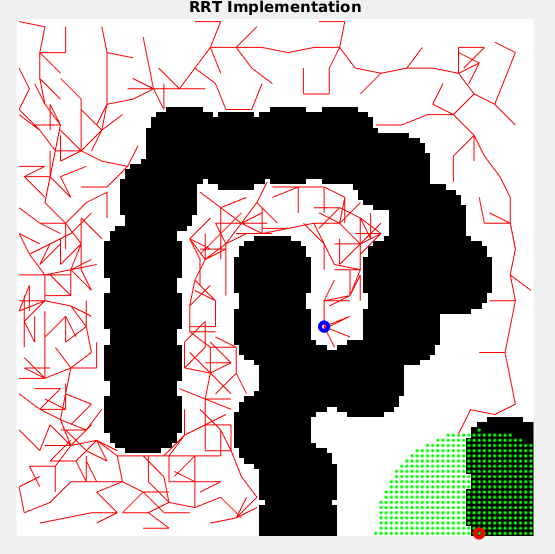
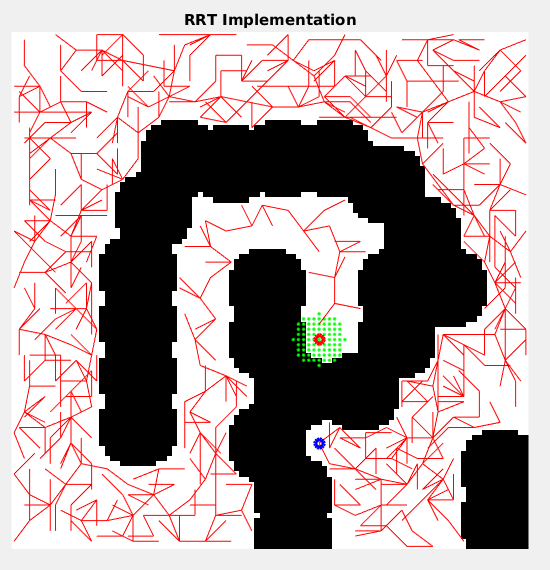
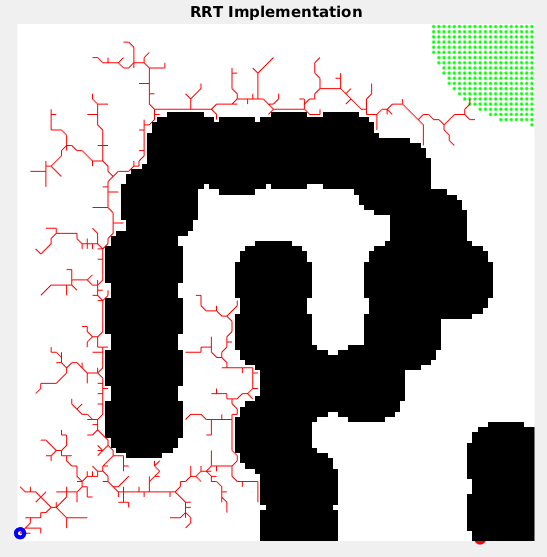
Sample Outputs
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Requirements
- Matlab R2014b or later.
Notes
- Tested on MATLAB R2016b, Arch Linux 2017.03.01, Kernel: 4.9.11
License
RRT (Rapidly-Exploring Random Trees) using the MIT license.