Video Tutorials
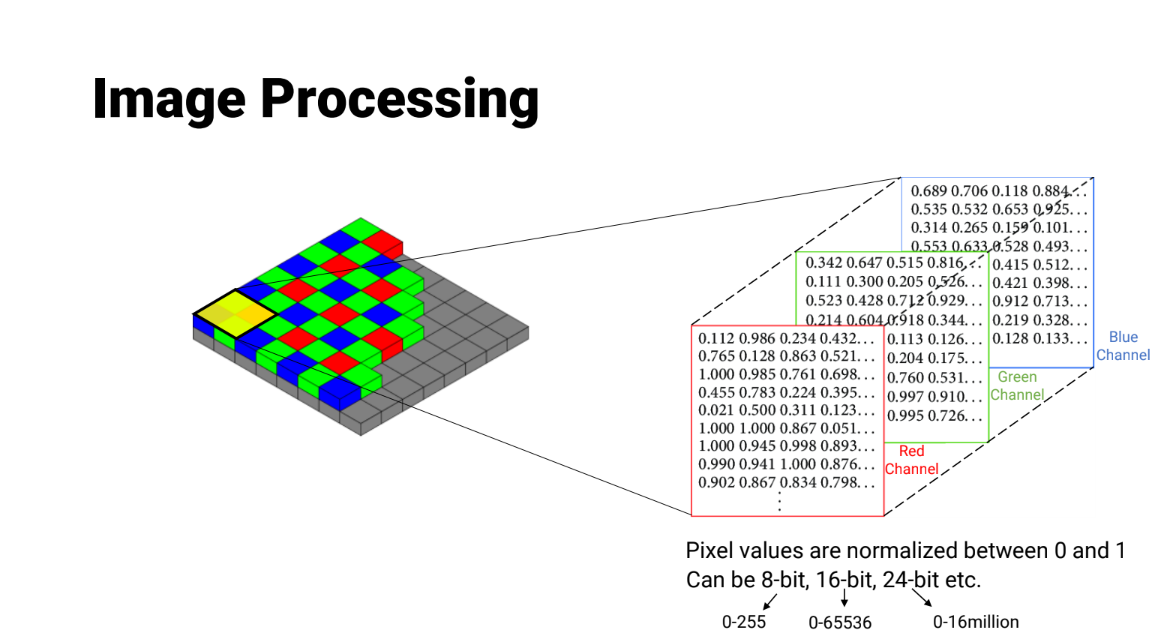
This lecture deals with how images are processed digitally to aid in detection and navigation tasks for quadrotors.
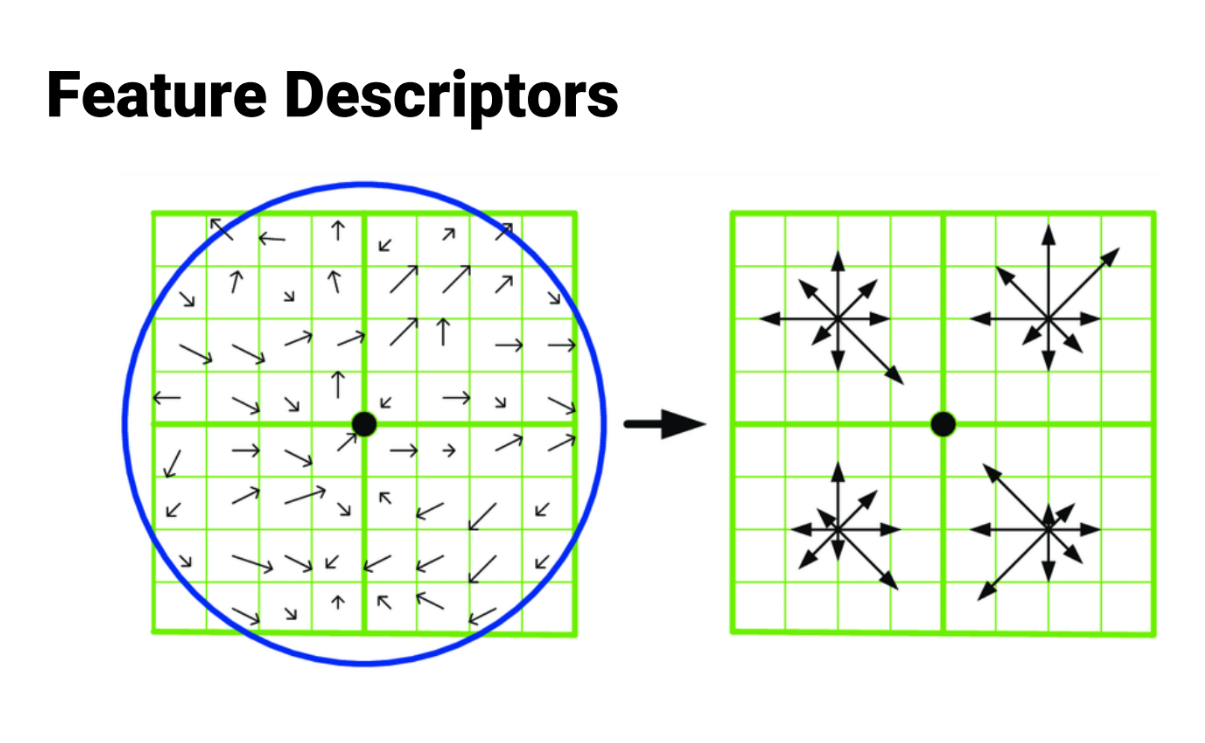
This video talks about the fundamental building blocks in computer vision: features!
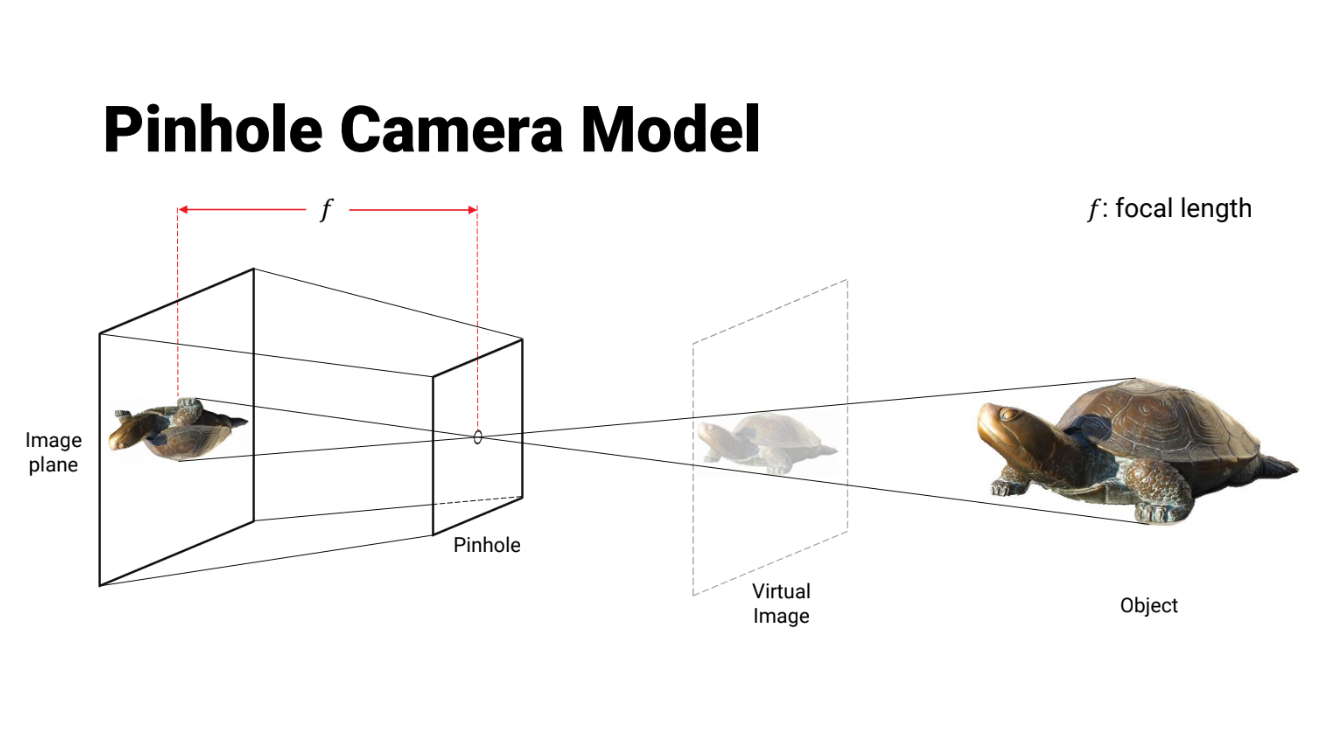
This video talks about camera models in the computer vision.
In this lecture, we learn various types of 2D and 3D transformations applied on the image plane.
This lectures deals with solving the problem of structure from motion and how epipoles can be helpful.
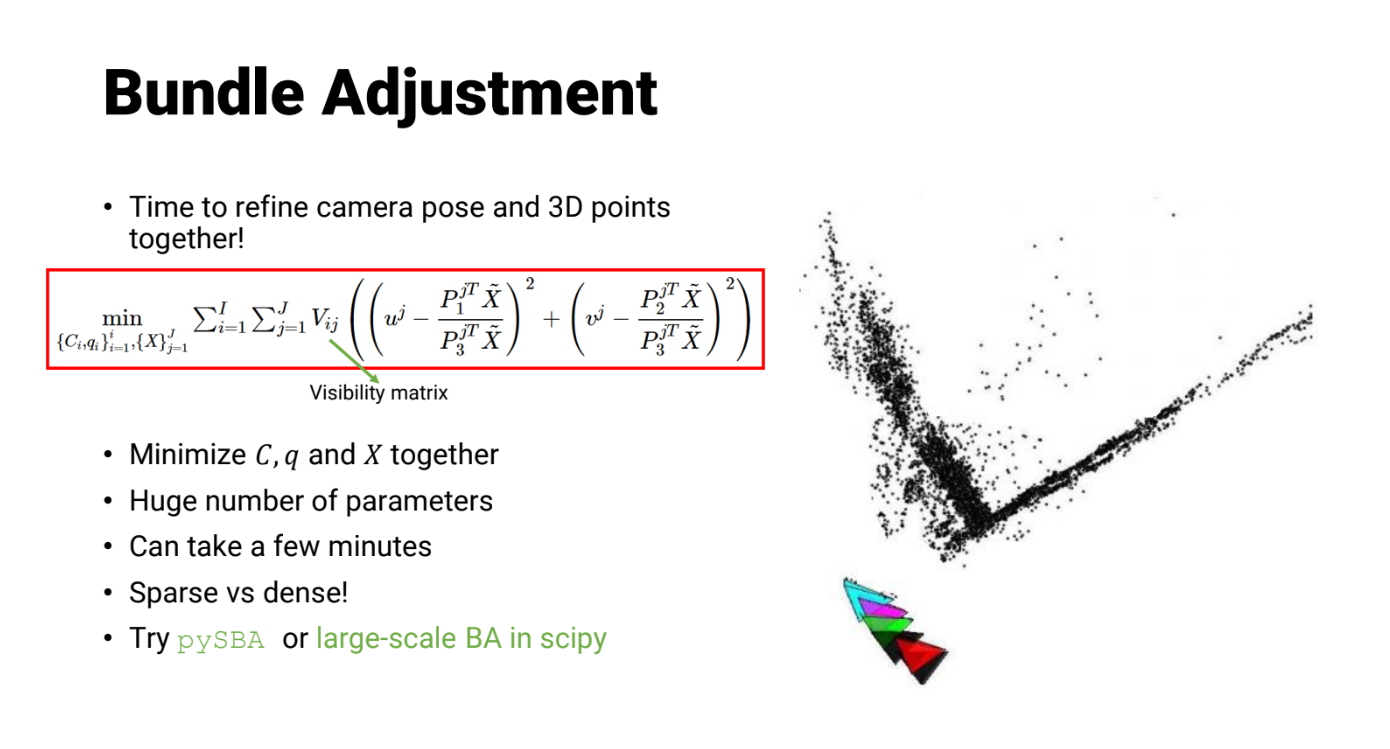
This deals with Perpective-n-Point problem and Bundle Adjustment.
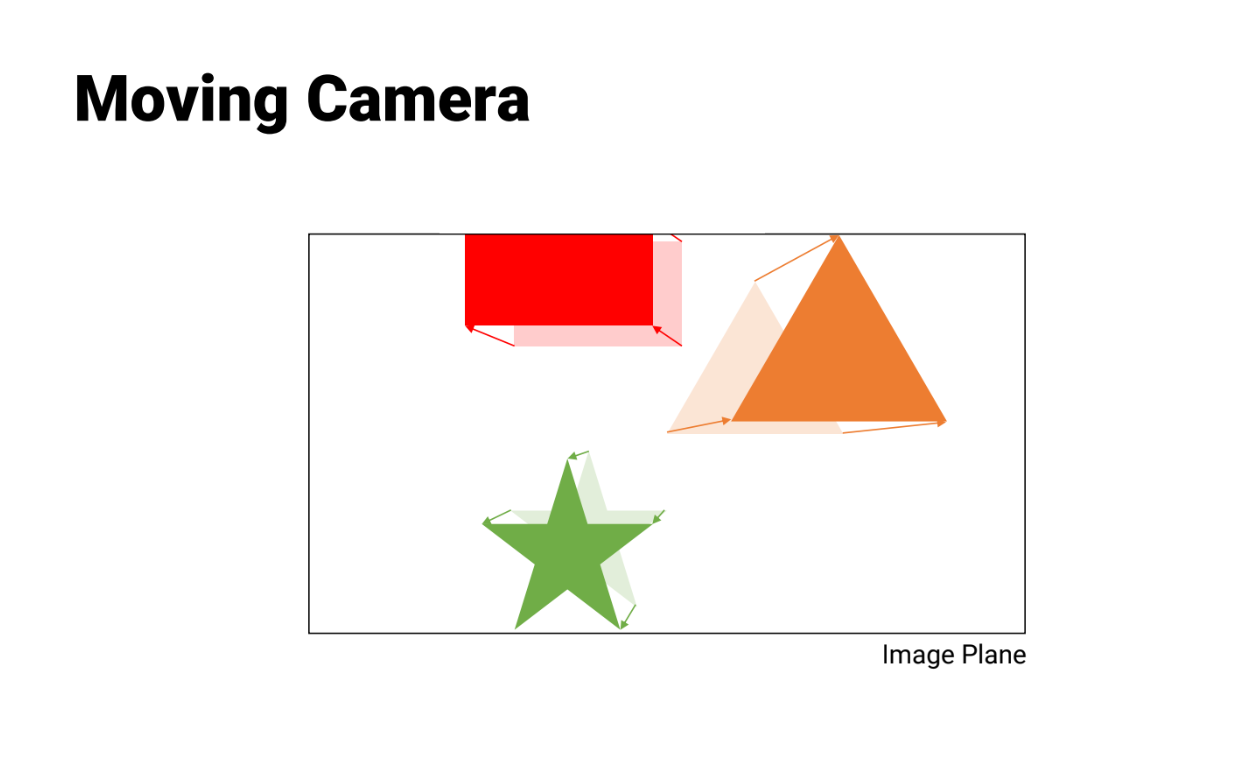
This video lecture deals with the pattern of motion of objects, surfaces and edges in the image.
We learn about the pattern of apparent motion of objects, surfaces in a scene caused by the relative motion between camera and objects.
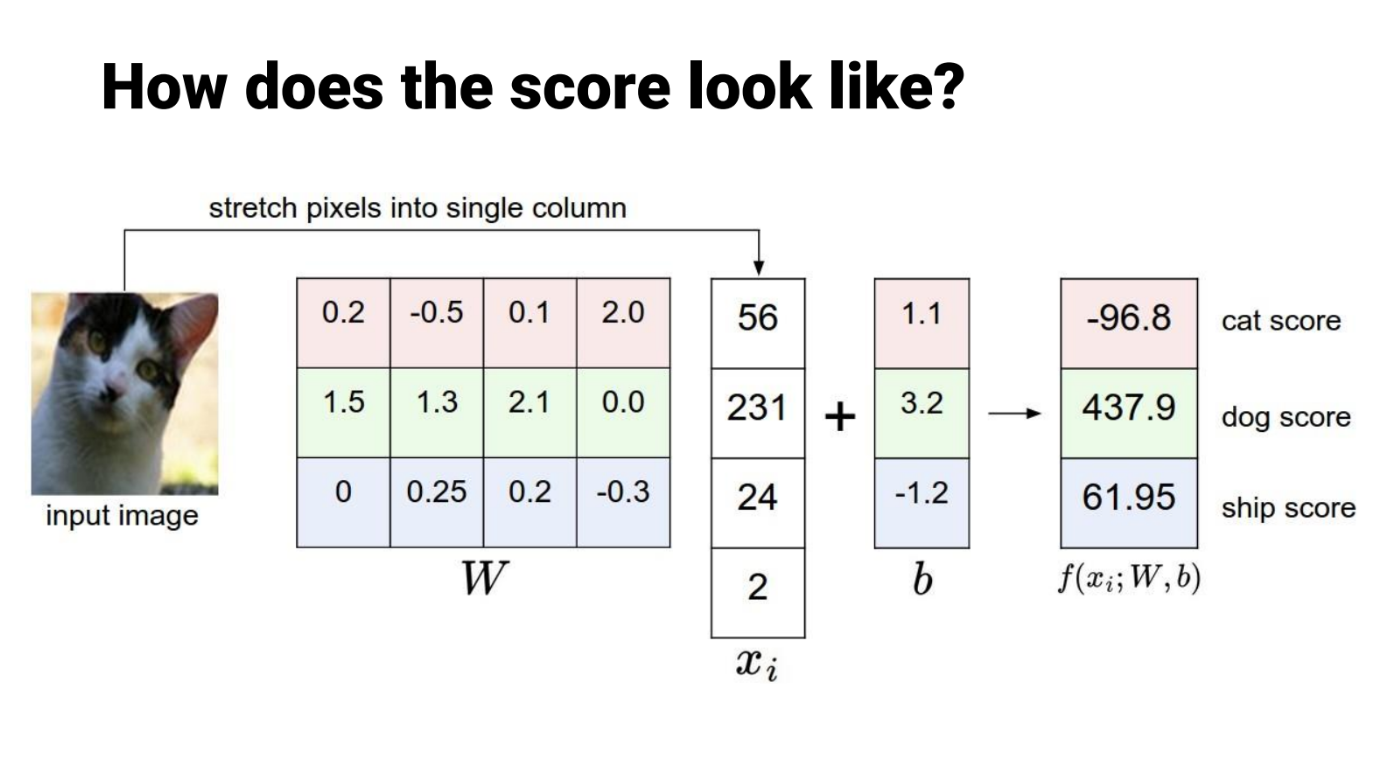
This lectures gives a brief overview of deep learning and its applications in Computer Vision.
This tutorial will teach you how to train your own YOLO neural network for custom data prediction without having deep learning/machine learning background.
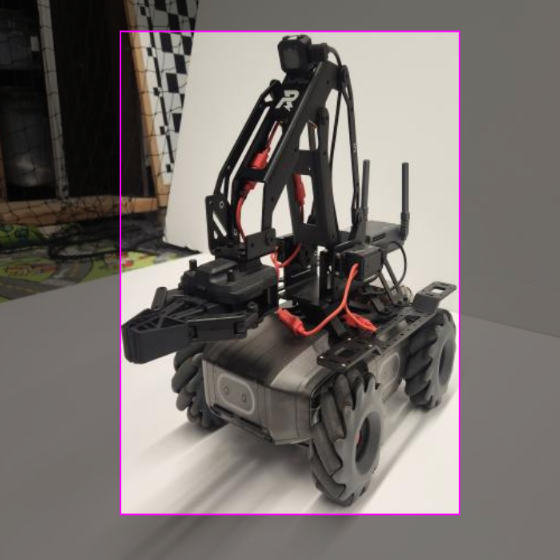
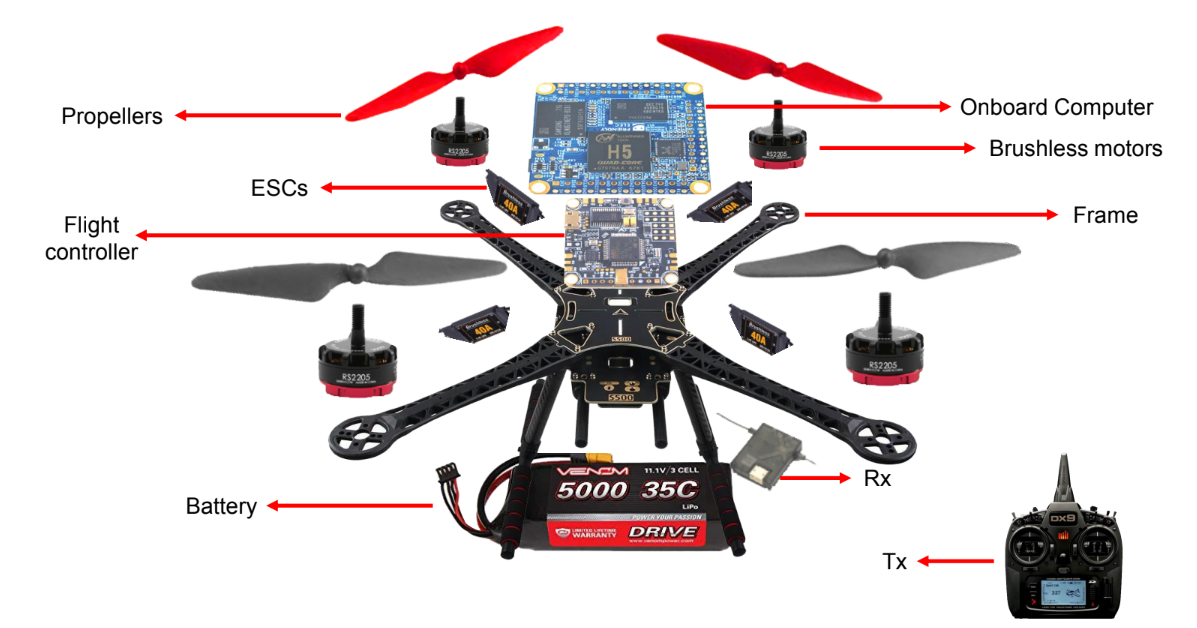
This class talks about how generic quadrotor hardware is designed for an autonomous flight.
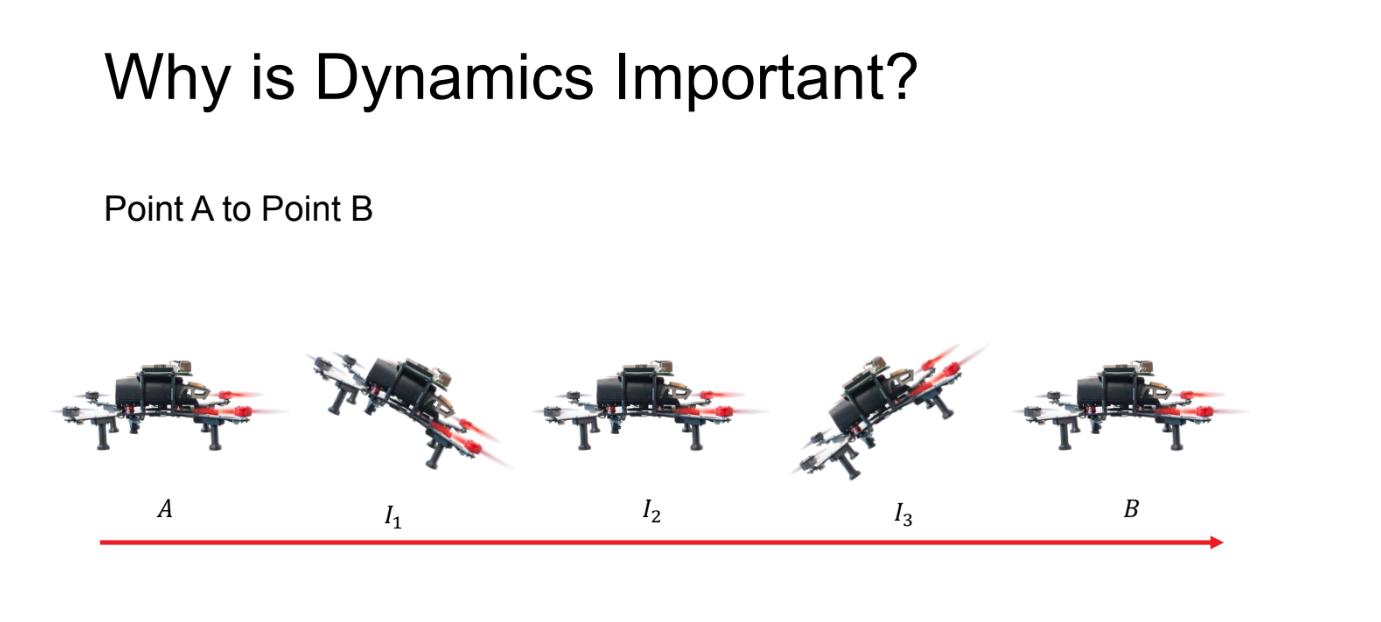
In this lecture, we'll learn the mathematical derivation of the Newtonian Mechanics for a quadrotor and how it is affected by thrust, mass distribution, etc.
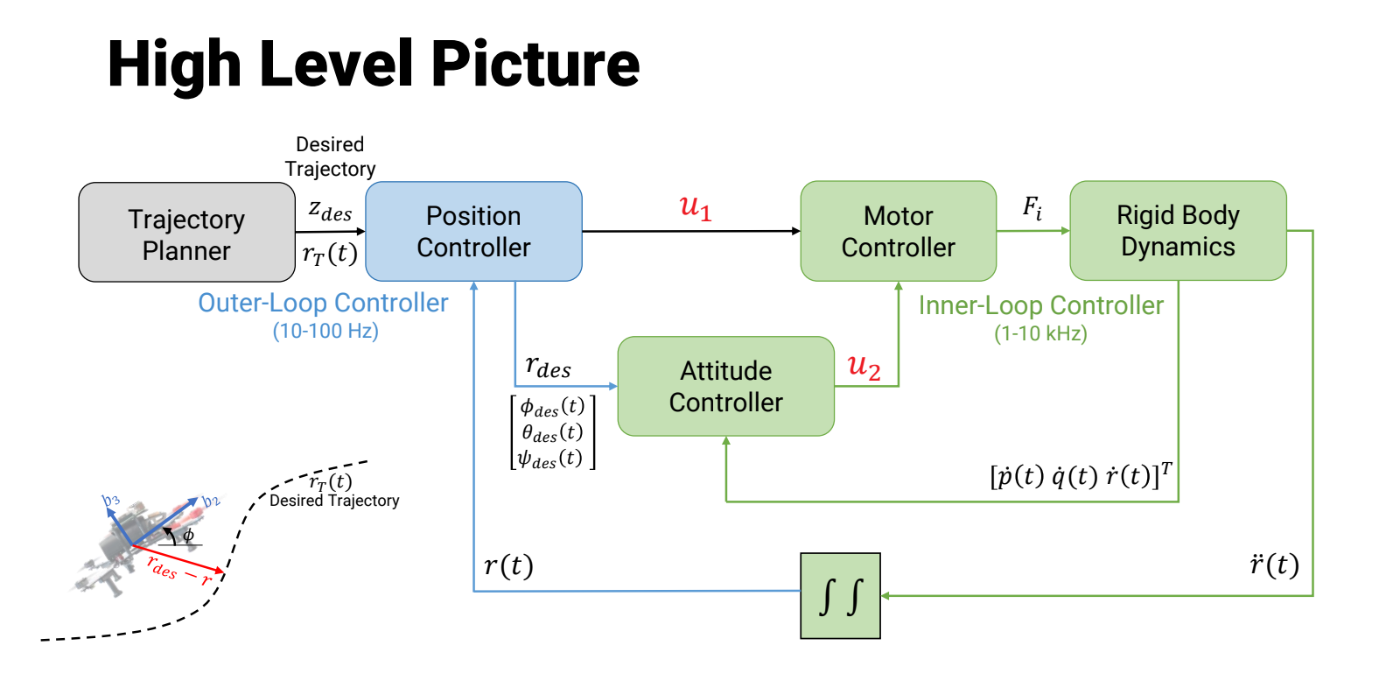
In this lecture, we'll learn about how the quadrotor inner loop and trajectory controller is written.