Research
For a complete list of my scholarly publications, please refer to My Lab's Website - PRAISE at CU Boulder .
2023
Minimal Perception: Enabling Autonomy on Resource Constrained Robots
Ph.D. Dissertation
Chahat Deep Singh, advised by Yiannis Aloimonos.
June 2023.
Ann G. Wylie Fellowship for Oustanding Dissertation
Details
Thesis
Thesis Video
June 2023.
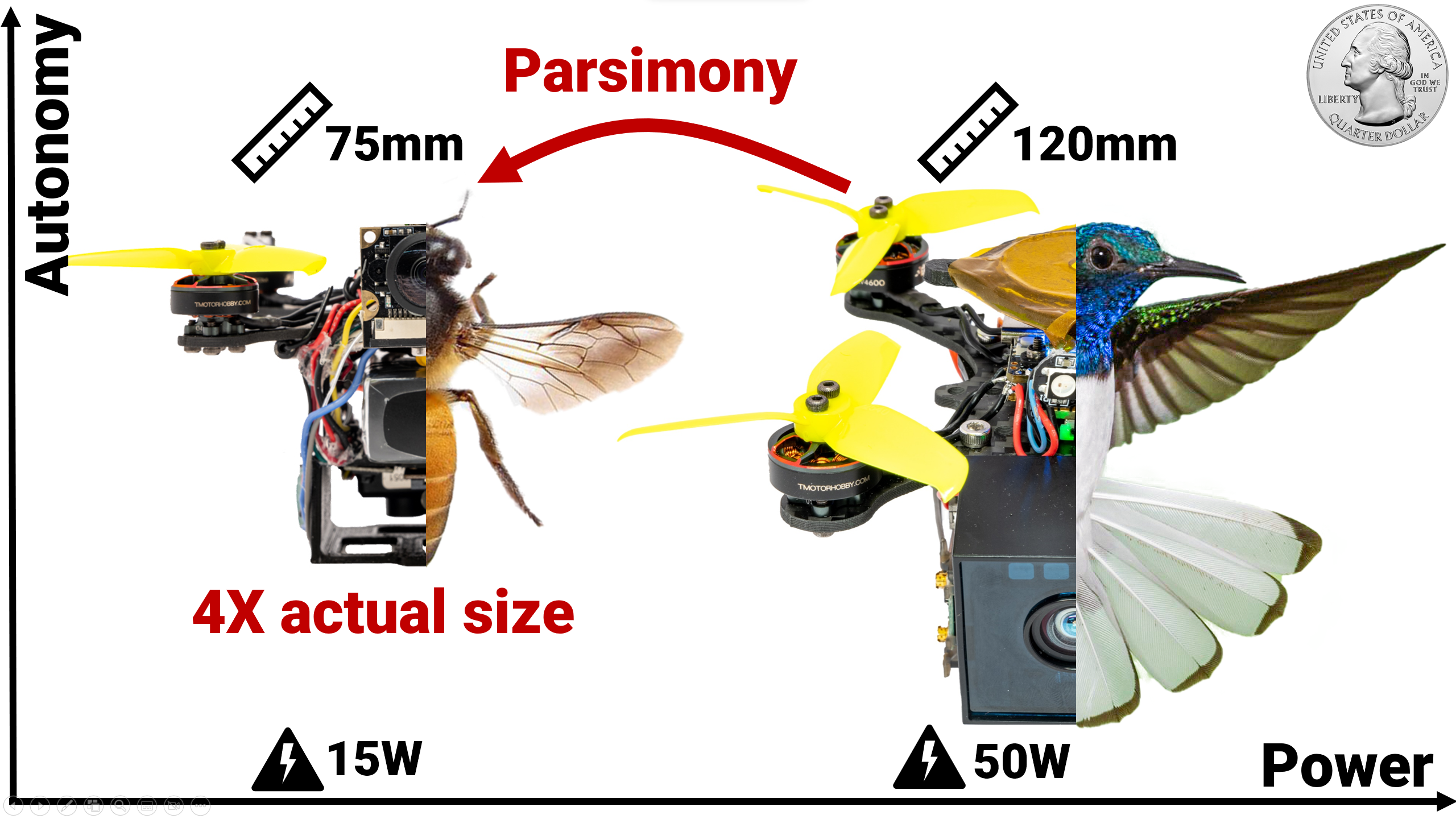
Ajna: Generalized Deep Uncertainty For Minimal Perception on Parsimonious Robots
Science Robotics 2023
Chahat Deep Singh*, Nitin J. Sanket*, Cornelia Fermüller, Yiannis Aloimonos.
Science Robotics - August 2023. (* Equal Contribution)
Project Page
Video
Paper
AcTExplore: Active Tactile Exploration on Unknown Objects
ICRA 2024
IEEE International Conference on Robotics and Automation (Under Review), 2024.
Project Page
Video
PDF
IEEE International Conference on Robotics and Automation (Under Review), 2024.
RoboBeeHive: Pollinating Flowers in the Wild using a Swarm of Robot Bee Drones.
Chahat Deep Singh, Nitin J. Sanket, Yiannis Aloimonos.
BBC Earth
University of Maryland
IEEE Spectrum
Voice of America
UMD Research: Maryland Today
YourCurrent
Maryland Today
News Wires
AZO Robotics
ISR UMD
Drone DJ
Click here to go to the RoboBeeHive page.

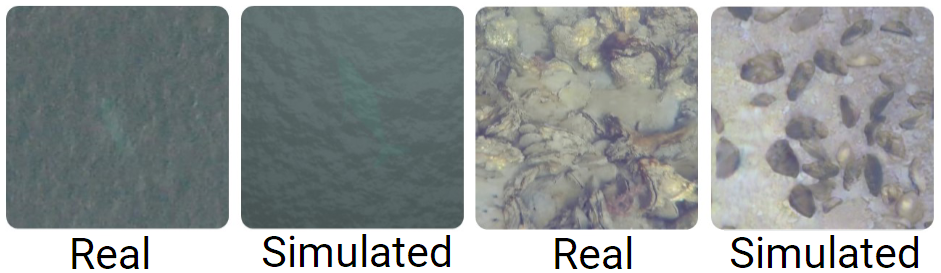
SeaDroneSim2: Enhancing Detection of Martime and Marine Objects with Synthetic Images
RA-M 2023
Xiaomin Lin, Akshaj Gaur, Cheng Lio, Chahat Deep Singh, Nare Karapetyan, Miao Yu, Yiannis Aloimonos.
Robot Automation Magazine (Under Review), 2023.
Coming Soon
Robot Automation Magazine (Under Review), 2023.
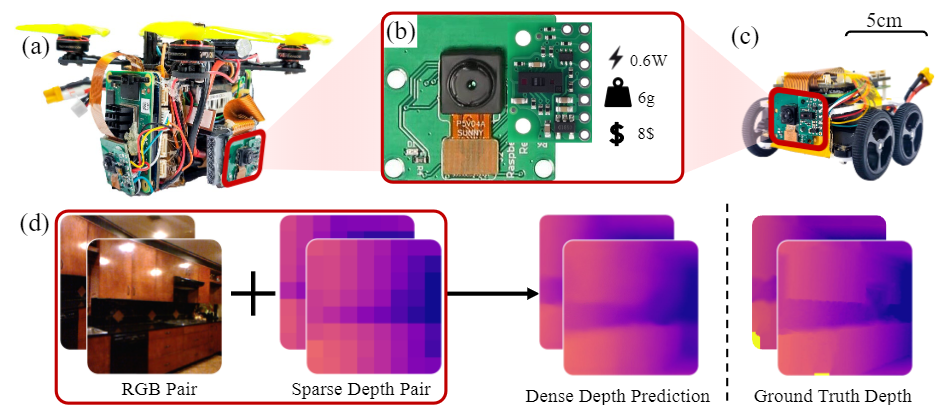
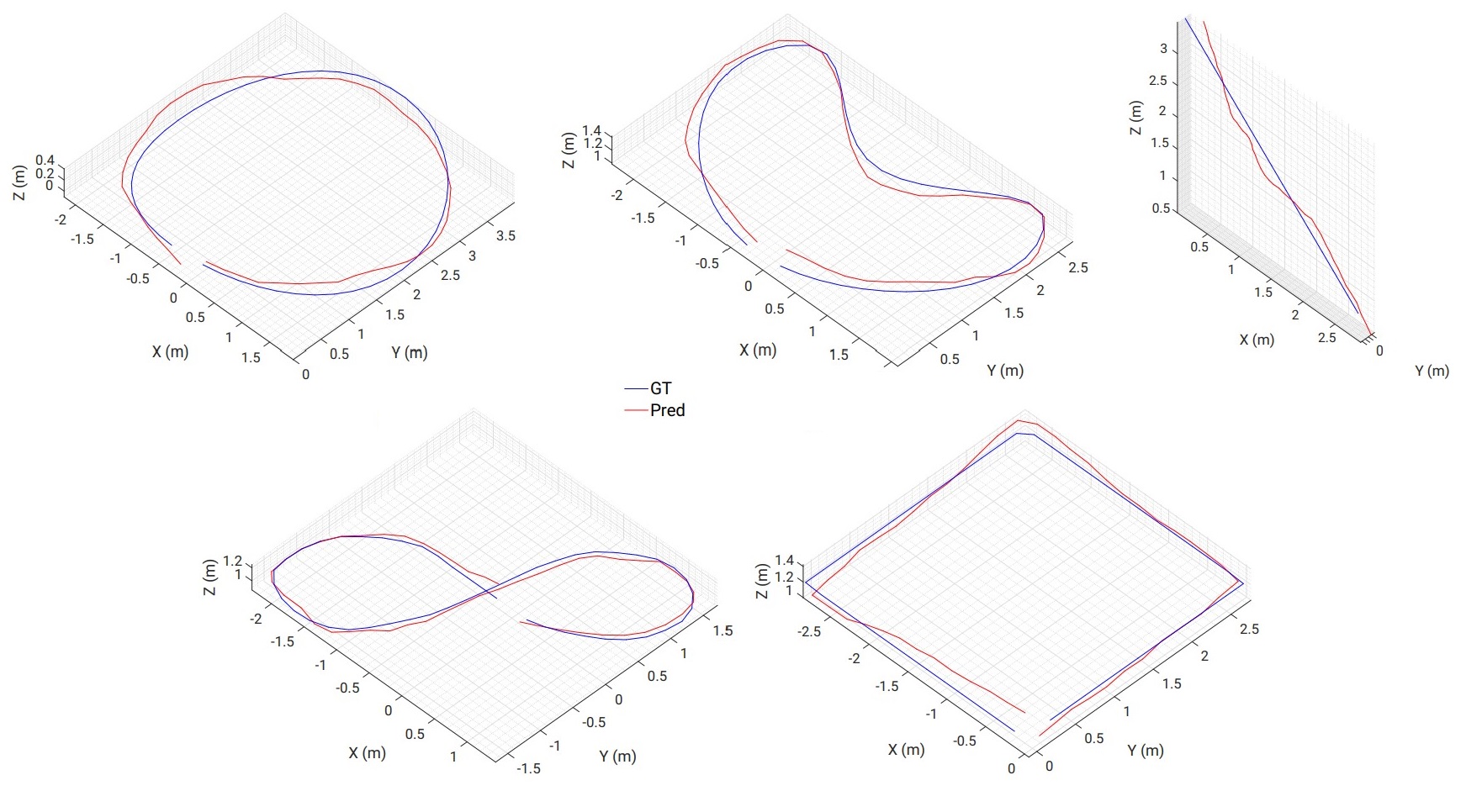
TinyDepth: Generalized Neural Metric Depth for Palm-sized Robots
RA-L 2023
Chahat Deep Singh, Rohan Uttamsingh, Yashveer Jain, Cornelia Fermüller, Nitin. J. Sanket, Guido C.H.E. de Croon, Yiannis Aloimonos.
IEEE Robotics and Automation Letter (Under Review), 2023.
Coming Soon
IEEE Robotics and Automation Letter (Under Review), 2023.
EVSaccades: Leveraging an Active Prism to Enhance Feature Detection in Neuromorphic Cameras
Science Robotics 2023
Botao He, Ze Wang, Yuan Zhou, Jingxi Chen, Chahat Deep Singh, Cornelia Fermüller, Yiannis Aloimonos, Fei Gao.
Science Robotics (Under Review), 2022.
Preprint Technical Report

WorldGen: A Large Scale Generative Simulator
ICRA 2023
Chahat Deep Singh, Riya Kumari, Cornelia Fermüller, Nitin J. Sanket, Yiannis Aloimonos.
IEEE International Conference on Robotics and Automation (ICRA), 2023.
Paper Project Page (Coming Soon) Video Cite
NudgeSeg: Zero-Shot Object Segmentation by Repeated Physical Interaction
IROS 2021
Chahat Deep Singh*, Nitin J. Sanket*, Cornelia Fermüller, Yiannis Aloimonos.
IEEE International Conference on Intelligent Robots and Systems (IROS), 2021. (* Equal Contribution)
Paper Project Page Video Cite

EVPropNet: Detecting Drones By Finding Propellers For Mid-Air Landing And Following
RSS 2021
Nitin J. Sanket, Chahat Deep Singh, Chethan M. Parameshwara, Cornelia Fermüller, Guido C.H.E. de Croon, Yiannis Aloimonos, Robotics Science and Systems (RSS), 2021.
Paper Project Page Video Cite
MorphEyes: Variable Baseline Stereo For Quadrotor Navigation
ICRA 2021
Nitin J. Sanket, Chahat Deep Singh, Varun Asthana, Cornelia Fermüller, Yiannis Aloimonos, IEEE International Conference on Robotics and Automation (ICRA) , 2021.
Paper Project Page Video Cite
PRGFlow: Benchmarking SWAP-Aware Unified Deep Visual Inertial Odometry
IET Electonic Letters 2021
Nitin J. Sanket, Chahat Deep Singh, Cornelia Fermüller, Yiannis Aloimonos, Electronics Letters 57, no. 16 (2021): 614-617.
Paper Project Page Code Cite
0-MMS: Zero-Shot Multi-Motion Segmentation With A Monocular Event Camera
ICRA 2021
Chethan M. Parameshwara, Nitin J. Sanket, Chahat Deep Singh, Cornelia Fermüller, Yiannis Aloimonos, IEEE International Conference on Robotics and Automation (ICRA), 2021.
Paper Project Page
Video
Cite
EVDodgeNet: Deep Dynamic Obstacle Dodging with Event Cameras
ICRA 2020
Nitin J. Sanket*, Chethan M. Parameshwara*, Chahat Deep Singh, Cornelia Fermüller, Davide Scaramuzza, Yiannis Aloimonos, IEEE International Confernce on Robotics and Automation, Paris, 2020. (* Equal Contribution)
Paper Project Page Video Cite
GapFlyt: Active Vision Based Minimalist Structure-less Gap Detection For Quadrotor Flight
RA-L 2018 | IROS 2018
Chahat Deep Singh*, Nitin J. Sanket*, Kanishka Ganguly, Cornelia Fermüller, Yiannis Aloimonos, IEEE Robotics and Automation Letters, 2018. (* Equal Contribution)
Project Page
Paper
Video
Cite

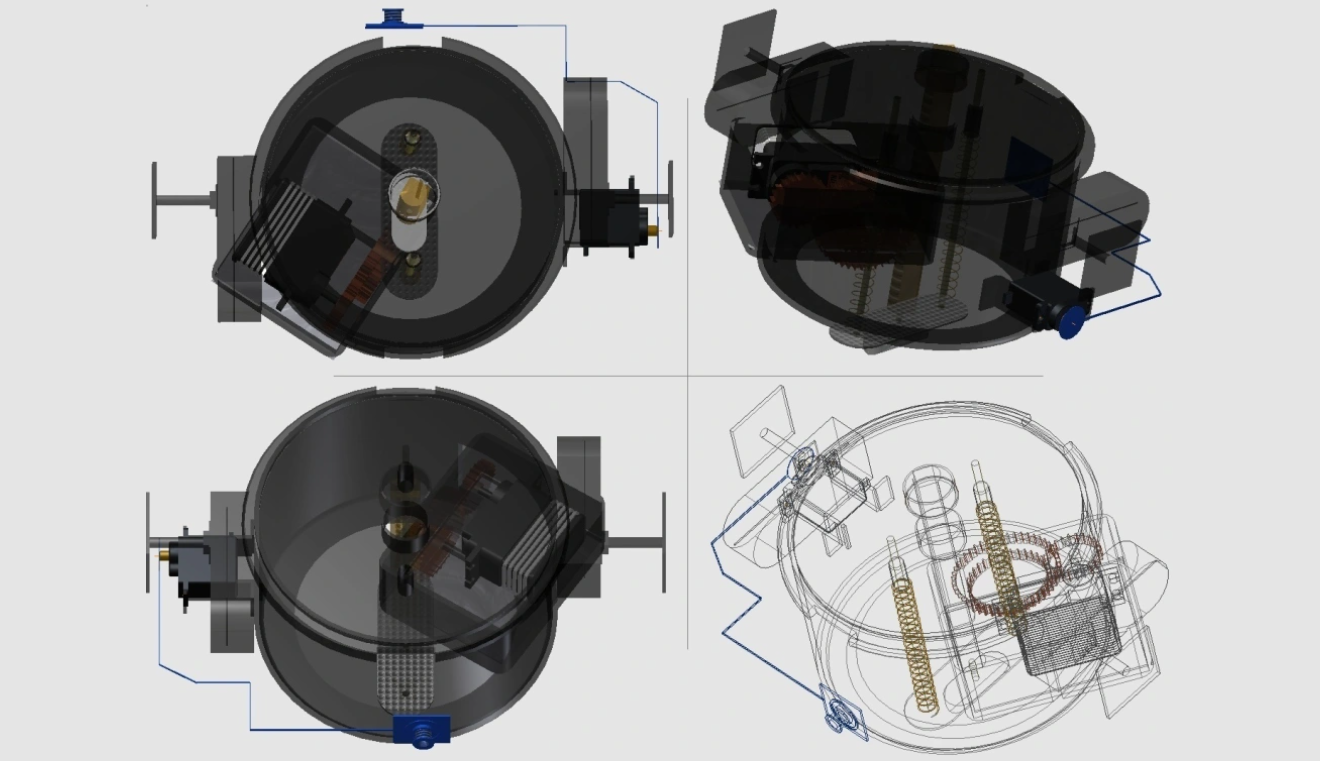
RAVHEN: Mobile Surveillance Spheroid Robot with Static Equilibrium Camera and Leaping Mechanism
RAVHEN: Reconnaissance Advanced Vehicle for Hostile ENvironment
IJCTA 2016
Shamsheer Verma, Chahat Deep Singh, Sarthak Mittal, Prateek Arora and Arvind Rehalia. International Journal of Control Theory and Applications, 09(41) 2016, 473-488. ISSN: 0974-5572.
Paper Video Cite
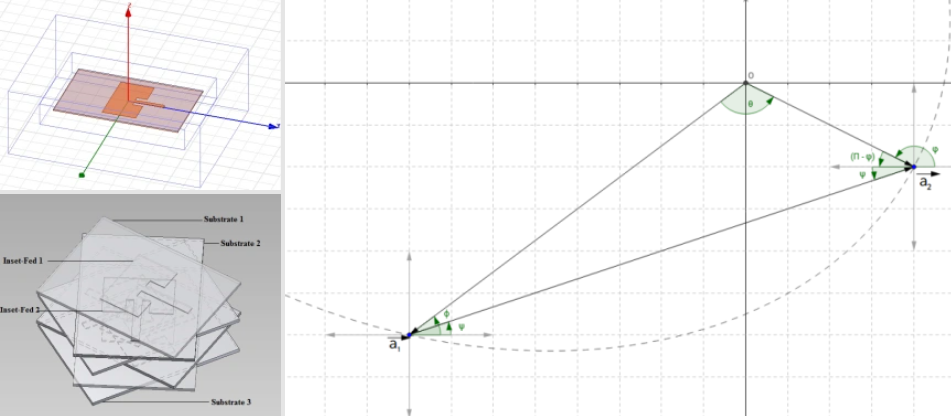
A Novel Method to Increase Transmission Power Efficiency in Portable Systems
IJIRSET 2015
Chahat Deep Singh, B. Sridhar International Journal of Innovative Research in Science, Engineering and Technology, 04(11) 2015, ISSN: 2319-8753.
Paper