Latest News
Dec 01, 2023
Minimal Perception work featued in MRC Newsletter
My thesis work has been featured in the fall 2023 edition of Maryland Robotics Center news letter.
Webpage
Thesis Video
Thesis PDF

Sep 16, 2023
AcTExplore is submitted to ICRA 2024
Our work AcTExplore that proposed an active method for tactile exploration that can be used for 3D reconstruction and various other applications has been submitted to the IEEE International Conference on Robotics and Automation (ICRA) 2024.
Project Page
Video
PDF
August 16, 2023
Our Work - Ajna featured on the cover of Science Robotics
The work demonstrates that utilizing only the uncertainty in optical flow can result towards solving a plethora of real world robotics problem in a minimalist fashion. This work illustrates its finding by showing results of drone dodging dynamic obstacles, navigating through unknown spaces, finding and flying through unknown shaped gaps.
Science Page
Science Page

August 16, 2023
Ajna is accepted in Science Robotics
Our work Ajna that proposed a generalized formulation for deep uncertainty and how it will enable autonomy in resource-constrained robots has been accepted by Science Robotics for August 2023.
Work by Chahat Deep Singh, Nitin J. Sanket, Cornelia Fermuller and Yiannis Aloimonos.
Project Page
Project Page
July 8, 2023
Joined Maryland Robotics Center as a Postdoctoral Associate
I joined Maryland Robotics Center to work him Prof. Yiannis Aloimonos and Prof. Pratap Tokekar to work on Minimal Perception, Autonomous Drone Swarms and Multimodal Systems.
June 26, 2023
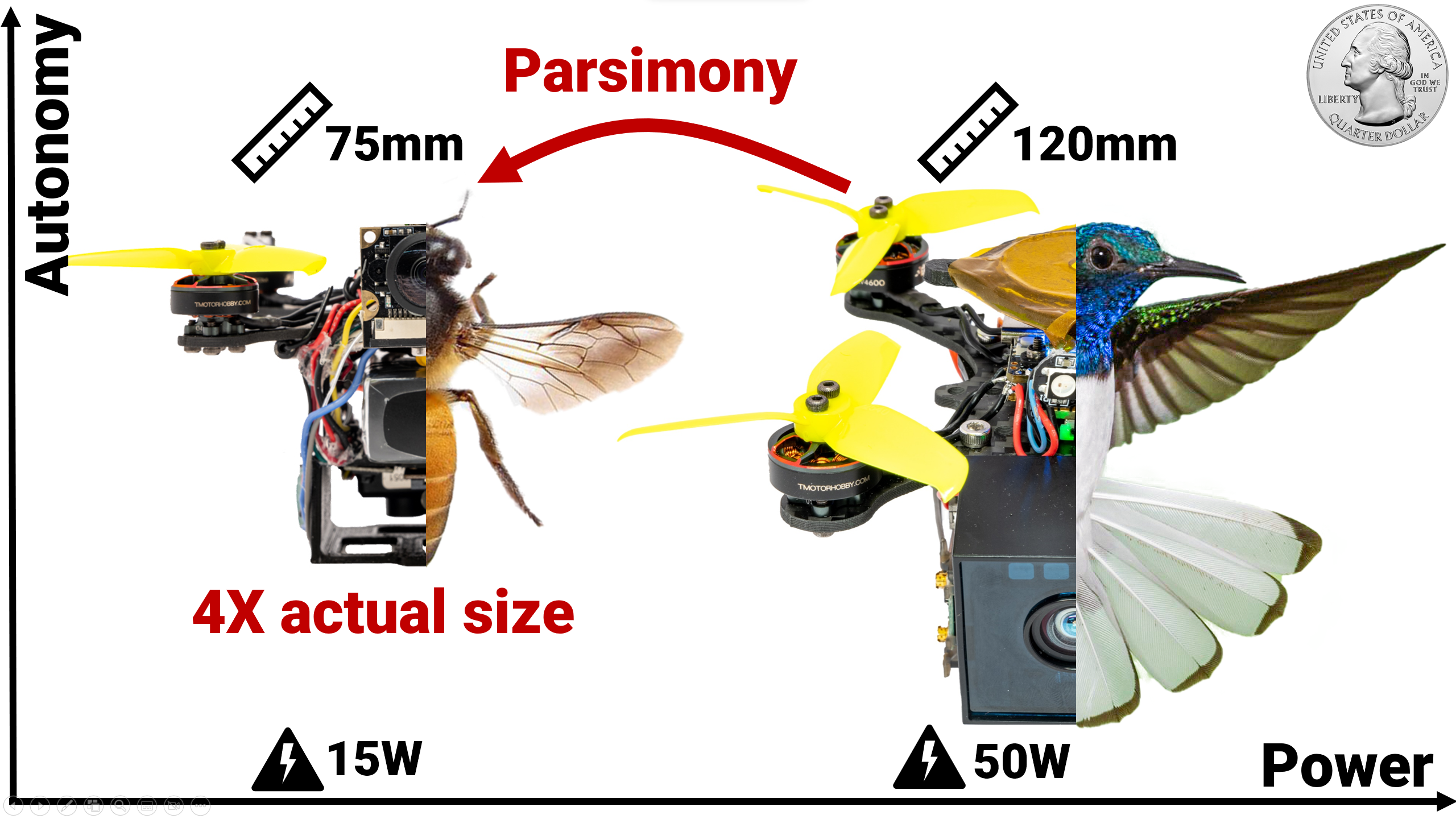
Ph.D. Thesis Defended
I successfully defended my Ph.D. dissertation on Minimal Perception at the University of Maryland, College Park. This thesis explores the challenge of developing autonomous systems for smaller robots used in precise tasks like confined space inspections and robot pollination. These robots face limitations in real-time perception due to computing, power, and sensing constraints. To address this, we draw inspiration from small organisms such as insects and hummingbirds, known for their sophisticated perception, navigation, and survival abilities despite their minimalistic sensory and neural systems. This research aims to provide insights into designing compact, efficient, and minimal perception systems for tiny autonomous robots.
Advised by Prof. Yiannis Aloimonos and Dr. Cornelia Fermuller. Thank you Prof. Aloimonos, Pro.f Chopra, Prof. de Croon, Prof. Metzler, Prof. Sanket and Dr. Fermuller for being a part of my committee.
Details
Thesis Video
Thesis
Details
Thesis Video
Thesis
June 02, 2023
WorldGen is presented in London at ICRA 2023
Our work WorldGen, a generative simulator that can generate countless photorealistic scene is presented in ICRA 2023 in London.
Project Page
May 09, 2023
Celebrated Wylie Fellowship at the University of Maryland
I received and celebrated Ann G. Wylie Fellowship for Outstanding Disseratation during my Ph.D.
Read More

April 17, 2023
RoboBeeHive is featured in BBC Earth and IEEE Spectrum
Our work on drone or 'RoboBee' pollination has been featured on BBC Earth and IEEE Spectrum.
Video

March 24, 2023
MIT Seminar on Minimal Perception
I was invited to give a seminar on Minimal Perception: A Vision for the future of tiny autonomous robots at MIT. I was invited by Prof. Carlone
Details